RUFOR.ORG
»
Скрытность подводных аппаратов
| Новая тема Ответить |
|
|
Опции темы | Поиск в этой теме | Опции просмотра |
 07.06.2019, 11:05
#1
07.06.2019, 11:05
#1
|
#1 |


Чебуралиссимус
|
Проницаемая среда и демаскирующие факторы
Боевое применение подводных лодок и других подводных аппаратов основано на таком их качестве, как скрытность действий для атакуемого противника. Водная среда, в глубине которой оперируют ПА, ограничивает дистанцию обнаружения средствами радио- и оптической локации величиной в несколько десятков метров. С другой стороны, высокая скорость распространения звука в воде, достигающая 1,5 км/с, позволяет использовать шумопеленгацию и эхолокацию. Вода также является проницаемой для магнитной компоненты электромагнитного излучения, распространяющегося со скоростью 300000 км/с.  Дополнительными демаскирующими факторами ПА являются: — кильватерный след (воздушно-водяной шлейф), генерируемый движителем (гребным винтом или водометом) в приповерхностном слое воды или в глубинных слоях в случае развития кавитации на лопастях движителя; — химический след от выхлопных газов теплового двигателя ПА; — тепловой след, возникающий за счет отвода тепла силовой установки ПА в водную среду; — радиационный след, оставляемый ПА с ядерными силовыми установками; — поверхностное волнообразование, связанное с перемещением водных масс при движении ПА. Оптическая локация Несмотря на ограниченную дистанцию обнаружения, оптическая локация нашла свое применение в акватории тропических морей с большой прозрачностью воды в условиях малого волнения и небольших глубин. Оптические локаторы в виде камер высокого разрешения, работающих в инфракрасном и видимом диапазонах, устанавливаются на борту самолетов, вертолетов и БПЛА в комплекте с прожекторами большой мощности и лазерными локаторами. Ширина полосы обзора достигает 500 метров, глубина видимости в благоприятных условиях — 100 метров. 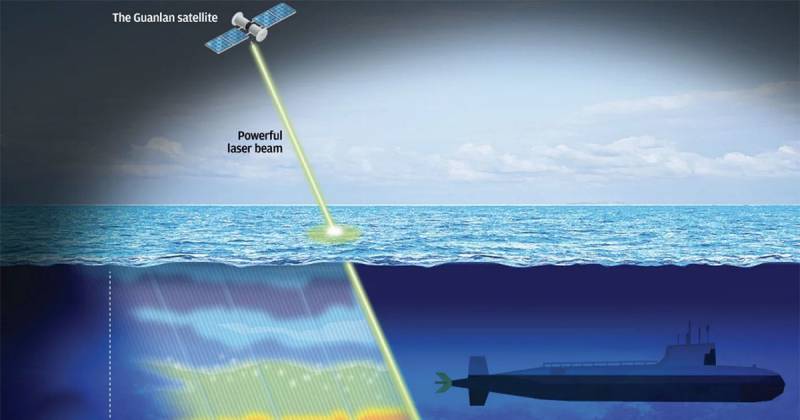 Радиолокация используется для обнаружения поднятых над поверхностью воды перископов, антенн, воздухозаборных устройств и самих ПА в надводном положении. Дальность обнаружения с помощью РЛС, установленной на борту авиационного носителя, определяется высотой полета носителя и составляет от нескольких десятков (выдвижные устройства ПА) до нескольких сотен (собственно ПА) километров. В случае использования в выдвижных устройствах ПА радиопрозрачных конструкционных материалов и стелс-покрытий дальность обнаружения снижается более чем на порядок. Еще одним методом радиолокационного метода обнаружения ПА, движущихся в подводном положении, является фиксация спутного волнообразования на поверхности моря, генерируемого в процессе гидродинамического воздействия корпуса и движителя ПА на водную толщу. Это процесс можно наблюдать на большой площади акватории как с авиационного, так и спутникового носителя радиолокатора, оснащенного специализированными аппаратно-программными средствами для выделения слабого рельефа спутной волны ПА на фоне помех от ветрового волнения и волнообразования от надводных судов и береговой черты. Однако спутные волны становятся различимыми только при движении ПА на небольшой глубине в условиях штилевой погоды.  Дополнительные демаскирующие факторы в виде кильватерного, теплового, химического и радиационного следа в основном используются для преследования ПА с целью скрытного контроля его перемещения (без выхода на рубеж гидроакустического контакта) или производства торпедной атаки со стороны кормовых курсовых углов атакуемого ПА. Относительно малая ширина следа в сочетании с курсовым маневрированием ПА вынуждает преследователя двигаться по зигзагообразной траектории со скоростью, в два раза большей скорости ПА, что увеличивает дистанцию обнаружения самого преследователя за счет большего уровня генерируемых шумов и выхода из теневой кормовой зоны ПА. В связи с этим движение по следу носит временный характер с целью выхода на дистанцию гидроакустического контакта с ПА, позволяющего в том числе квалифицировать цель по критерию свой/чужой и типу подводного аппарата.  Магнитометрический метод Эффективным методом обнаружения ПА является магнитометрический, действующий вне зависимости от состояния морской поверхности (волнение, лед), глубины и гидрологии акватории, рельефа дна и интенсивности судоходства. Применение в конструкции ПА диамагнитных конструкционных материалов позволяет всего лишь сократить дистанцию обнаружения, поскольку в состав силовой установки, движителя и оборудования ПА в обязательном порядке входят стальные детали и электротехнические изделия. Кроме того, гребной винт, рабочее колесо водомета и корпус ПА (вне зависимости от конструкционного материала) в движении накапливают на себе статические электрические заряды, которые генерируют вторичное магнитное поле. Перспективные магнитометры оснащаются сверхпроводящими датчиками SQUID, криогенными сосудами Дьюара для хранения жидкого азота (по образцу ПТРК Javelin), и компактными холодильными машинами по поддержанию азота в жидком состоянии.  Существующие магнитометры имеют дальность обнаружения атомной подводной лодки со стальным корпусом на уровне 1 км. Перспективные магнитометры обнаруживают АПЛ со стальным корпусом на дальности 5 км. АПЛ с титановым корпусом — на дальности 2,5 км. Кроме материала корпуса, сила магнитного поля прямо пропорционально зависит от водоизмещения ПА, поэтому малоразмерный подводный аппарат типа «Посейдон» с титановым корпусом имеет в 700 раз меньшую величину магнитного поля, чем АПЛ «Ясень» со стальным корпусом, и соответственно, меньшую дальность обнаружения. Основными носителями магнитометров являются противолодочные самолеты базовой авиации, для повышения чувствительности датчики магнитометра размещаются в хвостовом выступе фюзеляжа. С целью увеличения глубины обнаружения ПА и расширения полосы поиска противолодочные самолеты осуществляют полеты на высоте 100 и менее метров от поверхности моря. Надводные носители используют буксируемый вариант магнитометров, подводные носители – бортовой вариант с компенсацией собственного магнитного поля носителя. Кроме ограничения по дальности, магнитометрический метод обнаружения имеет ограничение и по величине скорости движения ПА – в связи с отсутствием градиента собственного магнитного поля неподвижные подводные объекты распознаются всего лишь как аномалии магнитного поля Земли и требуют последующей классификации с помощью гидроакустики. В случае использования магнитометров в системах самонаведения торпед/противоторпед ограничение по скорости отсутствует из-за обратной последовательности обнаружения и классификации целей в ходе торпедной/противоторпедной атаки.  Гидроакустический метод Наиболее распространенным методом обнаружения ПА является гидроакустический, который включает в себя пассивное пеленгование собственных шумов ПА и активную эхолокацию водной среды с помощью направленного излучения звуковых волн и приема отраженных сигналов. Гидроакустика использует весь диапазон звуковых волн – инфразвуковые колебания с частотой от 1 до 20 Гц, слышимые колебания с частотой от 20 Гц до 20 КГц и ультразвуковые колебания от 20 КГц до нескольких сотен КГц. Гидроакустические приемопередатчики включают в свой состав конформные, сферические, цилиндрические, планарные и линейные антенны, собранные из множества гидрофонов в трехмерные сборки, активные фазированные решетки и антенные поля, подключенные к специализированным аппаратно-программным устройствам, обеспечивающим прослушивание шумового поля, генерацию эхолокационных импульсов и прием отраженных сигналов. Антенны и аппаратно-программные устройства объединяются в гидроакустические станции (ГАС). Приемо-передающие модули гидроакустических антенн изготовляются из следующих материалов: — поликристаллическая пьезокерамика, преимущественно цирконат-титанат свинца, модифицированный добавками стронция и бария; — пьезоэлектрическая пленка фторполимера, модифицированного тиамином, переводящим полимерную структуру в бета-фазу; — оптоволоконный интерферометр с лазерной накачкой. 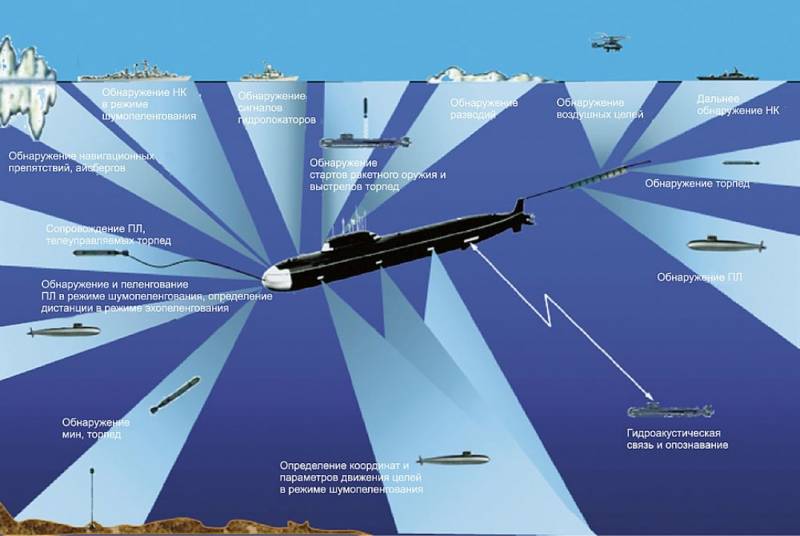 Пьезокерамика обеспечивает наибольшую удельную мощность генерации звуковых колебаний, поэтому она используется в гидролокаторах со сферической/цилиндрической антенной увеличенной дальности действия в режиме активного излучения, устанавливаемой в носовой оконечности морских носителей (на наибольшем расстоянии от движителя, генерирующего паразитные шумы) или монтируемой в капсуле, опускаемой на глубину и буксируемой за носителем. Пьезофторполимерная пленка с малой удельной мощностью генерации звуковых колебаний применяется для изготовления конформных антенн, расположенных непосредственно на поверхности корпуса надводных и подводных аппаратов одинарной кривизны (для обеспечения изотропности гидроакустических характеристик), работающих на прием всех видов сигналов или на передачу сигналов небольшой мощности.  Оптоволоконный интерферометр работает только на прием сигналов и состоит из двух волокон, одно из которых испытывает сжатие-расширение под действием звуковых волн, а другое служит в качестве опорной среды для измерения интерференции лазерного излучения в обоих волокнах. В силу малого диаметра оптоволокна его колебания сжатия-расширения не искажают дифракционный фронт звуковых волн (в отличии от пьезоэлектрических гидрофонов больших линейных размеров) и позволяют обеспечить более точное определение положения объектов в водной среде. Из оптоволоконных модулей формируют гибкие буксируемые антенны и донные линейные антенны протяженностью до 1 км. Пьезокерамика также используется в датчиках гидрофонов, пространственные сборки которых входят в состав плавучих буев, сбрасываемых в море с противолодочных самолетов, после чего гидрофоны опускаются на тросе на заданную глубину и переходят в режим шумопеленгации с передачей собранной информации по радиоканалу на борт самолета. Для увеличения площади контролируемой акватории вместе с плавучими буями сбрасываются серии глубинных гранат, взрывы которых гидроакустически подсвечивают подводные объекты. В случае применения противолодочных вертолетов или квадрокоптеров для поиска подводных объектов используется опускаемая на кабель-тросе приемо-передающая антенна бортовой ГАС, представляющая собой матрицу из пьезокерамических элементов. 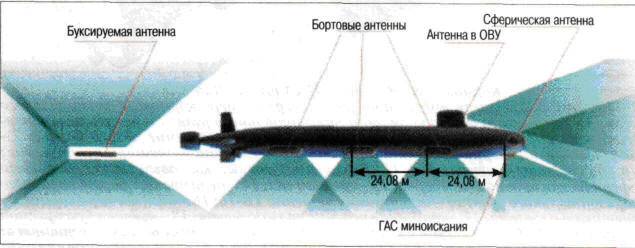 Конформные антенны из пьезофторполимерной пленки монтируются в виде нескольких секций, разнесенных вдоль борта ПА с целью определения не только азимута, но и расстояния (методом тригонометрии) до подводного источника шумов или отраженных локационных сигналов. Гибкие буксируемые и донные линейные антенны из оптоволокна, несмотря на относительную дешевизну, обладают отрицательным эксплуатационным свойством – в силу большой протяженности «нитки» антенны она испытывает изгибные и крутильные колебания под действием набегающего потока воды, в связи с чем точность определения направления на объект кратно ухудшается по сравнению с пьезокерамическими и пьезофторполимерными антеннами с жестким полотном. В связи с этим наиболее точные гидроакустические антенны выполняют в виде набора бобин, намотанных из оптоволокна и монтируемых на пространственных фермах внутри акустически прозрачных водонаполненных цилиндрических оболочек, защищающих антенны от внешнего воздействия потоков воды. Оболочки жестко крепятся к фундаментам, расположенным на дне и соединенным силовыми кабелями и линиями связи с береговыми центрами противолодочной обороны. В случае размещения внутри оболочек ещё и радиоизотопных термоэлектрических генераторов полученные устройства (автономные по энергоснабжению) переходят в разряд донных гидроакустических станций.  Современные ГАС обзора подводной обстановки, поиска и классификации подводных объектов работают в нижней части звукового диапазона – от 1 Гц до 5 КГц. Они монтируются на различных морских и авиационных носителях, входят в состав плавающих буев и донных станций, отличаются разнообразием форм и пьезоэлектрических материалов, местом своего монтажа, мощностью и режимом приема/излучения. ГАС поиска мин, противодействия подводным диверсантам-аквалангистам и обеспечения звукоподводной связи работают в ультразвуковом диапазоне на частотах свыше 20 КГц, в том числе в так называемом режиме звуковидения с детализацией объектов в масштабе нескольких сантиметров. Характерным образцом подобных устройств является ГАС «Амфора», сферическая полимерная антенна которой устанавливается на передней верхней оконечности ограждения рубок подводных лодок В случае наличия на борту мобильного носителя или в составе стационарной системы нескольких ГАС они объединяются в единый гидроакустический комплекс (ГАК) посредством совместной вычислительной обработки данных активной локации и пассивного шумопеленгования. Алгоритмы обработки предусматривают программное отстройку от шумов, генерируемых самим носителем ГАК, и внешнего шумового фона, генерируемого морским судоходством, ветровым волнением, многократным отражением звука от поверхности воды и дна на мелководье (реверберационных помех). Алгоритмы вычислительной обработки В основе алгоритмов вычислительной обработки шумовых сигналов, принятых от ПА, лежит принцип выделения циклически повторяющихся шумов от вращения лопастей движителей, работы щеток токосъемников электродвигателей, резонансный шум редукторов гребных винтов, вибрации от работы паровых турбин, насосов и другого механического оборудования. Кроме того, использование базы данных спектров шумов, характерных для того или иного типа объектов, позволяет квалифицировать цели по признакам свой/чужой, подводный/надводный, военный/гражданский, ударная/многоцелевая подлодка, бортовая/буксируемая/опускная ГАС и т.д. В случае предварительного составления спектральных звуковых «портретов» отдельных ПА можно проводить их опознание по индивидуальным особенностям работы бортовых механизмов. Выявление циклически повторяющихся шумов и построение трасс движения ПА требует накопления гидроакустической информации в течение десятков минут, что сильно замедляет обнаружение и классификацию подводных объектов. Гораздо более однозначными отличительными признаками ПА является звуки набора воды в балластные цистерны и их продувки сжатым воздухом, выхода торпед из торпедных аппаратов и подводный запуск ракет, а также работы гидролокатора противника в активном режиме, обнаруживаемой путем приема прямого сигнала на дистанции кратно большей, чем дистанция приема отраженного сигнала.  Кроме мощности локационного излучения, чувствительности приемных антенн и степени совершенства алгоритмов обработки полученной информации на характеристики ГАС существенное влияние оказывают подводная гидрологическая обстановка, глубина акватории, волнение поверхности моря, ледовое покрытие, рельеф дна, наличие шумовых помех от морского судоходства, песчаная взвесь, плавающая биомасса и другие факторы. Гидрологическая обстановка определяется дифференциацией температуры и солености горизонтальных слоев воды, имеющих в результате различную плотность. На границе между слоями воды (так называемом термоклине) звуковые волны испытывают полное или частичное отражение, экранируя ПА от выше или ниже расположенной поисковой ГАС. Слои в толще воды образуются в диапазоне глубин от 100 до 600 метров и изменяют свое расположение в зависимости от сезона года. Придонный слой воды, застаивающейся в углублениях морского дна, образует так называемое жидкое дно, непроницаемое для звуковых волн (за исключением инфразвука). Напротив, в слое воды одинаковой плотности возникает акустический канал, по которому звуковые колебания в среднем диапазоне частот распространяются на расстояние в несколько тысяч километров. 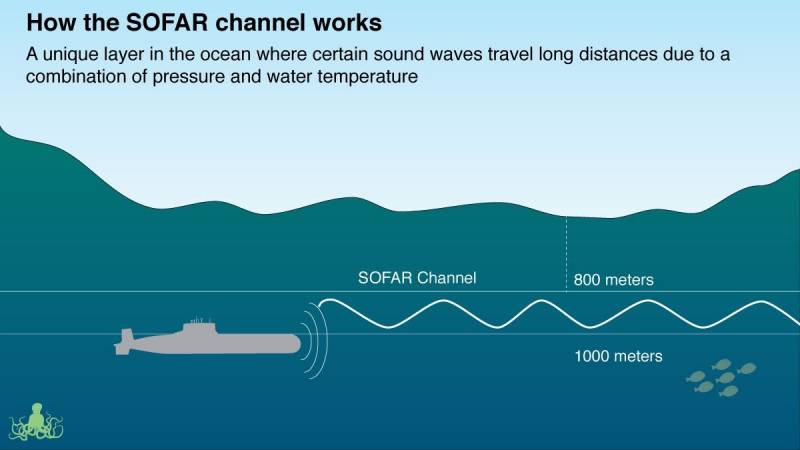 Указанные особенности распространения звуковых волн под водой определили выбор инфразвука и прилегающих к нему низких частот до 1 КГц в качестве основного рабочего диапазона ГАС надводных кораблей, подводных лодок и донных станций. С другой стороны, скрытность ПА зависит от конструктивных решений их бортовых механизмов, двигателей, движителей, компоновки и покрытия корпуса, а также скорости подводного хода. Наиболее оптимальный двигатель Снижение уровня собственных шумов ПА в первую очередь зависит от мощности, количества и типа движителей. Мощность пропорциональна водоизмещению и скорости хода ПА. Современные подводные лодки оснащаются единственным водометом, акустическое излучение которого экранировано с носовых курсовых углов корпусом ПЛ, с боковых курсовых углов – кожухом водомета. Область слышимости ограничена узкими кормовыми курсовыми углами. Вторым по значимости компоновочным решением, направленным на снижение собственных шумов ПА, является использование сигарообразной формы корпуса с оптимальной степенью удлинения (8 единиц для скорости ~ 30 узлов) без надстроек и выступов поверхности (за исключением рубки), обладающего минимальной турбулентностью. Наиболее оптимальным двигателем с точки зрения минимизации шумности неатомной подлодки является электромотор постоянного тока с прямым приводом гребного винта/водомета, поскольку электромотор переменного тока генерирует шум с частотой колебания силы тока в цепи (50 Гц для отечественных подлодок и 60 Гц для американских подлодок). Удельные весовые показатели низкооборотного электромотора слишком велики для обеспечения прямого привода на максимальной скорости хода, поэтому в этом режиме крутящий момент необходимо передавать через многоступенчатый редуктор, генерирующий характерный циклический шум. В связи с этим малошумный режим полного электродвижения реализуется при отключенном редукторе с ограничением по мощности электродвигателя и скорости хода ПА (на уровне 5-10 узлов). АПЛ имеют свои особенности по реализации режима полного электродвижения — кроме шума редуктора на малом ходу требуется исключить еще и шумы от циркуляционного насоса теплоносителя реактора, насоса перекачки рабочего тела турбины и насоса подачи забортной воды для охлаждения рабочего тела. Первая задача решается с помощью перевода реактора на естественную циркуляцию теплоносителя или использования жидкометаллического теплоносителя с МГД-насосом, вторая задача – посредством использования рабочего тела в сверхкритическом агрегатном состоянии и однороторной турбины/компрессора замкнутого цикла, третья – путем использования давления набегающего потока воды.  Шум, генерируемый бортовыми механизмами, минимизируется с помощью применения активных амортизаторов, работающих в противофазе с колебаниями механизмов. Однако первоначальный успех, достигнутый в этом направлении в конце прошлого века, имел серьезные ограничения для своего развития по двум причинам: — наличие больших резонаторных воздушных объемов внутри корпусов подлодок для обеспечения жизнедеятельности экипажа; — размещение бортовых механизмов в нескольких специализированных отсеках (жилом, командном, реакторном, машинном), не позволяющее агрегировать механизмы на единой раме, контактирующей с корпусом подлодки в ограниченном числе точек через совместно управляемые активные амортизаторы для устранения синфазного шума. Указанная проблема решается только с помощью перехода на малогабаритные необитаемые подводные аппараты без внутренних воздушных объемов с агрегированием силового и вспомогательного оборудования на единой раме. Кроме снижения интенсивности генерации шумового поля, конструктивные решения должны уменьшать вероятность обнаружения ПА с помощью эхолокационного излучения ГАС. Противодействие гидроакустическим средствам Исторически первым способом противодействия активным гидроакустическим средствам поиска было нанесения толстослойное резинового покрытия на поверхность корпуса подводных лодок, впервые примененное на «электроботах» Кригсмарине в конце Второй мировой войны. Эластичное покрытие в значительной степени поглощало энергию звуковых волн локационного сигнала, в связи с чем мощность отраженного сигнала была недостаточна для обнаружения и классификации подлодки. После принятия на вооружение АПЛ с глубиной погружения в несколько сот метров выявился факт обжатия резинового покрытия давлением воды с потерей свойств поглощения энергии звуковых волн. Внедрение в резиновое покрытие различных наполнителей, рассеивающих звук (по образцу ферромагнитного покрытия самолетов, рассеивающего радиоизлучение) частично устранило этот дефект. Однако расширение диапазона рабочих частот ГАС в область инфразвука подвело черту под возможностями использования поглощающего/рассеивающего покрытия как такового. Вторым способом противодействия активным гидроакустическим средствам поиска является тонкослойное активное покрытие корпуса, генерирующее колебания в противофазе с эхлокационным сигналом ГАС в широком диапазоне частот. Одновременно подобное покрытие без дополнительных затрат решает и вторую задачу – сведение к нулю остаточного акустического поля собственных шумов ПА. В качестве материала тонкослойного покрытия используется пьезоэлектрическая фторполимерная пленка, применение которой было отработано в качестве основы антенн ГАС. На данный момент ограничительным фактором выступает цена нанесения покрытия на корпус АПЛ с большой площадью поверхности, поэтому первоочередными объектами его применения являются необитаемые подводные аппараты. 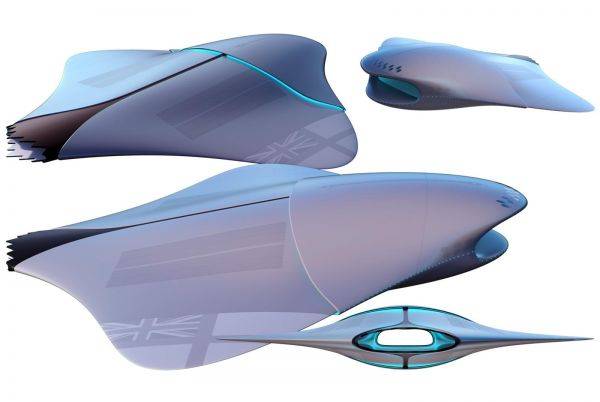 Последним из известных способов противодействия активным гидроакустическим средствам поиска является уменьшение размеров ПА с целью снижения т.н. силы цели – эффективной поверхности рассеивания эхолокационного сигнала ГАС. Возможность использования более компактных ПА основано на пересмотре номенклатуры вооружения и сокращении численности экипажа вплоть до полной необитаемости аппаратов. В последнем случае и в качестве ориентира может служить численность экипажа в 13 человек современного контейнеровоза Emma Mærsk водоизмещением 170 тысяч тонн. В результате сила цели может быть снижена на один – два порядка. Наглядным примером служат направления совершенствования подводного флота: — реализация проектов НПА «Статус-6» («Посейдон») и XLUUVS (Orca); — разработка проектов АПЛ «Лайка» и SSN-X с крылатыми ракетами средней дальности на борту; — разработка аванпроектов бионических НПА, оснащенных конформными водометными движителями c управляемым вектором тяги. Тактика применения средств противолодочной обороны На уровень скрытности подводных аппаратов большое влияние оказывает тактика применения средств противолодочной обороны и контртактика применения ПА.  К средствам ПЛО в первую очередь относятся стационарные системы обзора подводной обстановки типа американской SOSUS, в состав которой входят следующие рубежи обороны: — мыс Нордкап Скандинавского полуострова – остров Медвежий в Баренцевом море; — Гренландия – Исландия – Фарерские острова – Британские острова в Северном море; — Атлантическое и Тихоокеанское побережье Северной Америки; — Гавайские острова и остров Гуам в Тихом океане. Дальность обнаружения АПЛ четвертого поколения на глубоководных участках акватории вне зоны конвергенции составляет порядка 500, на мелководных – порядка 100 км. Во время движения под водой ПА вынужден время от времени корректировать свою фактическую глубину хода по отношению к заданной из-за толкающего характера воздействия движителя на корпус подводного аппарата. Возникающие при этом вертикальные колебания корпуса генерируют т.н. поверхностную гравитационную волну (ПГВ), длина которой достигает нескольких десятков километров при частоте несколько герц. ПГВ в свою очередь модулирует низкочастотный гидроакустический шум (т.н. подсветка), генерируемый в районах интенсивного морского судоходства или прохождения штормового фронта, расположенных за тысячи километров от места нахождения ПА. В этом случае максимальная дальность обнаружения АПЛ, движущейся с крейсерской скоростью, с помощью СОПО возрастает до 1000 км. Точность определения координат целей с помощью СОПО на максимальной дальности представляет собой эллипс размером 90 на 200 км, что требует проведения доразведки удаленных целей силами противолодочных самолетов базовой авиации, оснащенных бортовыми магнитометрами, сбрасываемыми гидроакустическими буями и авиационными торпедами. Точность определения координат целей в пределах 100 км от противолодочного рубежа СОПО вполне достаточна для применения ракето-торпед соответствующей дальности берегового и корабельного базирования. 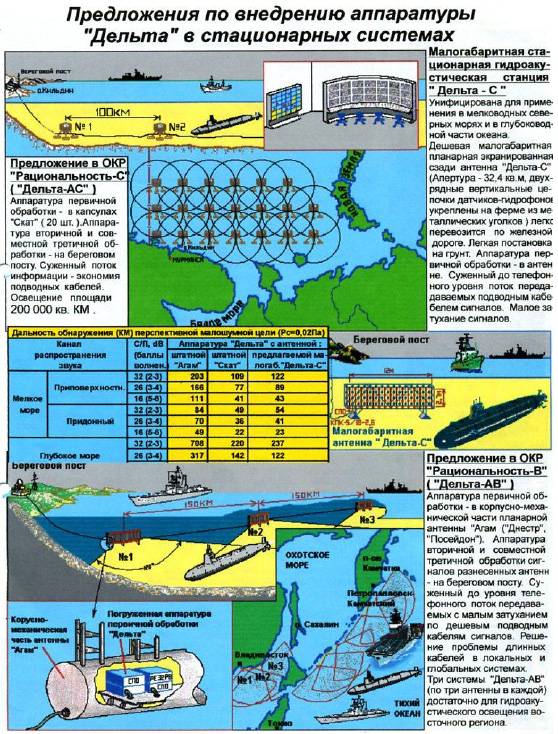 Надводные противолодочные корабли, оснащенные подкилевыми, опускаемыми и буксируемыми антеннами ГАС имеют дальность обнаружения АПЛ четвертого поколения, идущих на скорости 5-10 узлов, не более 25 км. Наличие на борту кораблей палубных вертолетов с опускаемыми антеннами ГАС расширяет дистанцию обнаружения до 50 км. Однако возможности применения корабельных ГАС ограничены скоростью хода кораблей, которая не должна превышать 10 узлов в связи с возникновением анизотропного обтекания подкилевых антенн и обрывом трос-кабелей опускаемых и буксируемых антенн. Тоже самое относится к случаю волнения моря силой более 6 баллов, которое вынуждает также отказаться от применения палубных вертолетов с опускаемой антенной. Эффективной тактической схемой обеспечения противолодочной обороны надводных кораблей, идущих с экономической скоростью 18 узлов или в условиях 6-бального волнения моря, является формирование корабельной группы с включением в её состав специализированного корабля освещения подводной обстановки, оборудованного мощной подкилевой ГАС и активными успокоителями качки. В противном случае надводные корабли должны отходить под защиту береговой СОПО и базовой противолодочной авиации, не зависящих от погодных условий. Менее эффективной тактической схемой обеспечения противолодочной обороны надводных кораблей является включение в состав корабельной группы подводной лодки, работа бортовой ГАС которой не зависит от волнения поверхности моря и собственной скорости хода (в пределах 20 узлов). При этом ГАС подводной лодки должна работать в режиме шумопеленгации из-за кратного превышения дистанции обнаружения эхолокационного сигнала над дистанцией приема отраженного сигнала. По данным зарубежной печати дальность обнаружения атомной подлодки четвертого поколения в указанных условиях составляет порядка 25 км, дальность обнаружения неатомной подлодки — 5 км.  Контртактика применения ударных подводных лодок включает следующие способы повышения их скрытности: — разрыв дистанции между собой и целью на величину, превышающую дальность действия ГАС СОПО, надводных кораблей и подводных лодок, участвующих в противолодочной обороне, с помощью применения по цели соответствующего оружия; — преодоление рубежей СОПО с помощью прохода под килем надводных судов и кораблей для последующего свободного оперирования в акватории, не освещаемой гидроакустическими средствами противника; — использование особенностей гидрологии, рельефа дна, шумов судоходства, гидроакустической тени затонувших объектов и покладки подлодки на жидкий грунт. Первый способ предполагает наличие внешнего (в общем случае спутникового) целеуказания или атаку стационарной цели с известными координатами, второй способ приемлем только до начала военного конфликта, третий способ реализуем в пределах рабочей глубины погружения подлодки и её оборудования верхней системой забора воды для охлаждения силовой установки или отводом тепла непосредственно на корпус ПА. Оценка уровня гидроакустической скрытности В заключение можно оценить уровень гидроакустической скрытности стратегического НПА «Посейдон» относительно скрытности ударной АПЛ «Ясень»: — площадь поверхности НПА в 40 раз меньше; — мощность силовой установки НПА в 5 раз меньше; — рабочая глубина погружения НПА в 3 раза больше. — фторопластовое покрытие корпуса против резинового покрытия; — агрегирование механизмов НПА на единой раме против разнесения механизмов АПЛ по отдельным отсекам; — полное электродвижение НПА на малом ходу с отключением всех видов насосов против полного электродвижения АПЛ на малом ходу без отключения насосов перекачки конденсата и забора воды для охлаждения рабочего тела. В результате дистанция обнаружения НПА «Посейдон», движущегося со скоростью 10 узлов, с помощью современных ГАС, установленных на любом типе носителя и работающих во всем диапазоне звуковых волн в режимах шумопеленгации и эхолокации, составит менее 1 км, что явно недостаточно не только для предотвращения атаки на стационарную береговую цель (учитывая радиус поражения ударной волной от взрыва спецБЧ), но и для защиты авианосной ударной группировки при её следовании в акватории, глубина которой превышает 1 км. Автор:Андрей Васильев Использованы фотографии:roe.ru, wiki.wargaming.net, , , |
  |
| Новая тема Ответить |
| Метки |
| вмф |
 Линейный вид
Линейный вид

|
|
 Похожие темы
Похожие темы
|
||||
| Тема | Автор | Раздел | Ответов | Последнее сообщение |
| ВМФ РФ до конца года получит 14 подводных аппаратов ТНПА «Марлин-350» | ezup | Новости Военно-морского флота | 0 | 02.04.2020 00:53 |
| Проекты летательных аппаратов Aereon Dynairship (США) | ezup | США | 0 | 02.10.2019 18:40 |
| Подводные исполины. Американский флот готовится к эпохе необитаемых подводных аппаратов | ezup | Военно-морской флот | 0 | 11.10.2018 20:40 |
| Топ 9 самых необычных летательных аппаратов | ezup | Военный кинозал | 0 | 01.02.2017 00:41 |
| Боевое применение беспилотных летательных аппаратов | ezup | Беспилотники | 0 | 04.05.2013 14:57 |